Эмо-роботы будут мечтать о настоящих овцах
Nexi, она хорошая. У неё столь живое лицо, что начинаешь общаться на равных. И её совсем не хочется расстраивать. Заботиться и заботиться – вот что хочется. А ещё появляется непреодолимое желание прогуляться по всему репертуару дешёвой мимики.
Что и сказать, задумана девочка-робот с прицелом на будущее. Роботизированное. В общем, они уже идут за вами!
Будущее, увидим, оно уже не то, что раньше. Мир роботов Азимова, с подкупающей реалистичностью экранизированный Голливудом всего лишь пара лет назад, сейчас не думается чем-то заоблачно фантастическим. Хотя бы потому, что поразмыслить об этом и представить во всей своей наготе многим уже удалось.
Но и технический прогресс старается не отставать. Учёные взялись за дело всерьёз, и затянувшаяся пьеса «В ожидании ИИ» не свидетельствует, что он совсем не придёт. Напротив, возможности кажутся такими осязаемыми, что появилась необходимость придать, как говорится, отечественным будущим соплеменникам человеческое лицо.
")
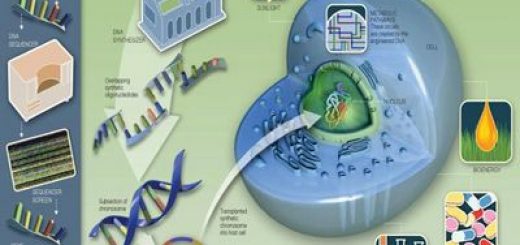
Принципиальная схема развития «эмоциональной» робототехники для большинства проектов выглядит приблизительно так. Но, как заявляют массачусетские учёные, до сих пор коммуникативные системы и обучающиеся не были адекватно реализованы «в металле» – только на компьютерных тренажёрах (иллюстрация Coradeschi et al./MEMBRANA).
Но, антропоморфные автомобили необходимы только для служения человеку. Защищать границы человекоподобными роботами – не совсем разумно. Для этого в полной мере подойдут и бесплотные сущности.
датчики движения и Обычная колючка – уже хорошо.
А вот «приручить» думающих роботов, оказать помощь людям пообвыкнуть в общении с ними – совсем вторая история. В итоге, лучший интеллект на сегодня – человеческий. И большая часть AI-проектов (и прожектов) являются некое его подобие.
Логично и в полной мере конечно сделать соответствующую внешнюю оболочку.
Как раз для этих целей несколько разработчиков из Массачусетского технологического университета (MIT) и придумала Некси (Nexi), робота с детским недетским набором и лицом чувств.
По официальной версии, это – «платформа для исследовательских проектов в области сотрудничества человек-робот и робот-робот». В случае если перевести на несложный язык, это указывает: подготовить людей к автомобилям, а последних научить ещё и между собой общаться.
Как именно? По аналогии с человеком – применяя подражательное поведение, другими словами имитируя эмоции и манеру общения Homo sapiens.
Для этого команда из MIT задумала создать группу из четырёх андроидов – мобильных, умеренно сообразительных и имеющих человекоподобные совокупности коммуникации. Новый «революционный» класс самодвижущихся и общительных роботов стал называться MDS (Mobile/Dexterous/Social – мобильные/сообразительные/общительные).
Сходство с человеком может упростить и ускорить обучение людей общению с техникой – сплошь роботизированной по нынешним временам. Бабушки в возрасте смогут и не кликать внуков, в случае если у них имеется такая внучка (иллюстрация MIT).
Некси – первенец американских учёных. И она уже способна на очень многое. К примеру, на несложные типы ответной реакции при общении с человеком.
То ли ещё будет!
Свойство к самообучению – в духе Терминатора – ставится в проекте MDS во главу угла. Робот обязан не просто демонстрировать человекоподобные ужимки, но и угадывать либо, вернее, планировать собственную реакцию на тот либо другой раздражитель. И вести себя соответственно.
При с Некси в качестве принципиальной базы для репликации были забраны дети. Их внутренний мир достаточно прекрасно изучен, более примитивен с позиций формирования ответной реакции (в сравнении с «продуманными» взрослыми). И наряду с этим ярок.
Эмоциональная сфера ребёнка формируется прежде всего через подражательное поведение. А примером для подражания выступает взрослый. Человек разумный.
У нексиного лица – 15 степеней свободы (иллюстрация MIT).
Конкретные результаты для того чтобы подхода – весьма похожое на правду копирование лицевой реакции и мимики на те либо иные раздражители.
С технической точки зрения совокупность мимикрии реализована не то дабы уж весьма навороченно, но достаточно замысловато.
Механизм поворота девичьей шеи имеет четыре степени свободы, а сама голова движется «с людской скоростью», другими словами максимально правдоподобно в динамике. Именно поэтому робот может кивать, качать головой либо наблюдать по сторонам.
Лицо Некси способно высказывать главные чувства: она может внимательно наблюдать на вас, может удивлённо вскидывать брови, кокетливо рукоплескать ресницами либо прищуривать веки, и завлекает к экспрессии подбородок.
Эмоции – врождённый механизм, но внешние проявления чувств не всегда являются врождёнными – кое-какие приобретаются в следствии воспитания и обучения (к примеру, интенсивная жестикуляция у южных народов). Этому и планируют научить девочку-робота (иллюстрация MIT).
А вот и самое увлекательное – совокупности коммуникации. Глаза девочки-робота скрывают две камеры на светочувствительных фотодиодах (CCD), а в качестве «третьего глаза» установлена активная инфракрасная камера (active 3D IR camera), которая разрешает приобретать трёхмерные снимки окружающих предметов.
С учётом того, что современная техника фиксирует многие невидимые людской взором проявления чувств (внешние приметы которых, со своей стороны, заботливо обрисованы физиологами), у Некси имеется все шансы стать более проницательной, чем иные люди. По крайней мере, просчитывать собственную реакцию заблаговременно – совершенно верно.
Кстати говоря, органы эмоций визуальной составляющей не ограничиваются: на голове установлены четыре микрофона – для «эхолокации» собеседника и – в будущем – для распознавания речи. А вот устройство для её синтезирования уже имеется. Имеется и особые тактильные сенсоры по всему телу.
Пардон, корпусу.
Вправду, Некси – это не только полезная мимика, но свойство деятельно проявлять себя в пространстве. Прежде всего – передвигаться, огибая препятствия.
«Тело» робота реализовано на платформе мобильного манипулятора uBot-5 работы мастеров из соседнего университета в Амхерсте (UMASS Amherst). А uBot-5, со своей стороны, выстроен на шасси Segway. По словам разработчиков, такая конструкция разрешает с уверенностью передвигаться в закрытых помещениях.
У Некси имеется не только «ноги», но и две полномасштабные автоматизированные руки – с хватательным механизмом, родным по своим чертям людской кисти, и вращающимся плечевым суставом, снабжающим «невиданную свободу перемещения».
Упрочнениями обеих рук Некси может поднять около 4,5 килограмма. Протяженность их обусловлена не только личными потребностями робота, но и возможностью применения их в коммуникативных опытах – к примеру, в то время, когда роботов MDS просят общими усилиями поднять что-нибудь тяжёлое и перенести на второе место.
На двух фото справа – платформа uBot-5 в собственном первозданном виде (фото MIT, flickr.com/sbisson).
У кистей и предплечья – по пять степеней свободы. На каждой ладони по четыре пальца, один из которых указательный, а один – большой, противопоставленный трём остальным по аналогии с человеком разумным.
Девочка может бережно что-то брать и крутить в руках – пальцы у неё эластичные. Теоретически роботы MDS должны обучиться подключать жестикуляцию к лицевой экспрессии.
Источник энергии – или литиево-ионные батареи (для независимого передвижения), или электричество из розетки (для статичных мизансцен).
Особая совокупность датчиков снабжает устойчивость и координацию перемещений, а ориентирование на местности и объезд препятствий вероятны благодаря встроенному комнатному лазеру. Соответствующая программная оболочка реализована на базе Linux.
Пальцы робота складываются из трёх фаланг – как у человека (фото MIT).
Вот кратко главные ТТХ эмо-робота. Пора задуматься о осуществимости и перспективах планов.
Появления персональных роботов, призванных уменьшить жизнь человеку, а где-то и разнообразить (либо кроме того одушевить) её, на данный момент очертя голову ожидают в совокупности здравоохранения, ухода за пожилыми людьми (на Западе это целая индустрия) и в образовательной сфере.
Не смотря на то, что успехи в развитии самообучающихся роботов велики, всецело реализовать эту концепцию без привлечения ИИ вряд ли окажется.
Но к тому моменту, в то время, когда это случится, сохраняют надежду массачусетские учёные, всё уже готовьсяк тому, дабы упаковать интеллект в соответствующую оболочку. Это как современная электронная начинка у самолётов: без неё они на поле боя непригодны, но и на кукурузник продвинутые «мозги» ставить бессмысленно.
Пока не осознан сам человек, о возможности репликации его эмоциональной сферы сказать рано. По крайней мере, путём создания соответствующих методов. Более того, свойство реагировать самым неожиданным образом – не побочный продукт, а фундаментальная черта людской психики, которая связана с адаптацией (фото с сайта industryweek.com).
Мало смущает только то, что строгой теории чувств не существует. Не говоря уже о том, что наука не знает, что такое «интеллект» – это, по солидному счёту, условное понятие. Но, многие ответные реакции возможно алгоритмизировать и ручками, без AI.
Но вот какая вещь: человек действует лишь тогда, в то время, когда его действия имеют суть. Причём обращение не о каком-то идеалистическом «смысле судьбы», а о в полной мере конкретных унаследованных химических комплексах, сигнализаторами которых и являются чувстве.
Не совсем ясно, чем себя будут стимулировать роботы. Может, изощрёнными формами единичек и нулей, быть может, и ещё чем. Но имеется шанс, что их чувства будут проявляться в совсем неподходящих для этого обстановках.
Тогда целый проект – насмарку.
Ещё среди вероятных рисков, возможно, стоит упомянуть подвижность чувственной сферы, которая нужна для адаптации и гибкости. Что из этого направляться? Эмоции необходимо воспитывать.
И для девочки Некси – по аналогии со в полной мере настоящими детьми – это весьма актуально. К чему приведёт подражание множественным «родителям» – громадной вопрос.
Кроме «эмо-проекта» планируется создать симулятор виртуальной реальности для роботов MDS – в нём будут проводиться групповые «психотерапевтические» тренинги. К главному симулятору будет прилагаться дополнительный – для атмосферы и реализации «твёрдых сценариев». Неудивительно: он разрабатывается на базе движка Unreal Tournament 2004 (иллюстрация MIT).
А в этом виде антропоморфность автомобили может сыграть злую шутку: у человека появится иллюзия, что робот осознаёт больше, чем он может в действительности.
Но имеется, имеется и плюсы, само собой разумеется. Кроме фактически крутизны Некси возможно упомянуть симпатичность концепции неестественного лица. Дамы-андроиды, о которых мы писали и неоднократно и каковые стремятся к подобию «и полному образу», оставляют по окончании себя лёгкое чувство кошмара.
От помой-му людской лица как-то не по себе.
Да и сама мысль о подражании весьма хороша. В итоге, эксперты MIT подчёркивают, что разработка «заточена» под эмпирическую модель. Посредством Некси и её сестёр и будущих братьев они желают осознать, что люди ожидают от роботов и в какой степени они это возьмут.
В противном случае чем при помощи опыта это сделать вправду нереально.