Геометрическая и кинематическая точность
Погрешности обработки, появляющиеся благодаря геометрической неточности станка. Виды появляющихся погрешностей определяются, с одной стороны, характером делаемой операции, с другой — характером отклонений во форме и взаимном расположении направляющих рабочих органов. К примеру, плоскость стола фрезерного станк должна быть параллельна плоскости, проходящей через ось шпинделя станка.
При несоблюдении указанного условия плоскость, обрабатываемая цилиндрической фрезой, не будет параллельна опорной поверхности. Плоскость, в которой происходит перемещение поперечных салазок по направляющим, кроме этого должна быть параллельна плоскости, проходящей через ось шпинделя, поскольку в другом случае перемещение поперечных салазок приведет к трансформации настроенного размера, определяющего расстояние между осью шпинделя и поверхностью стола.
")
Рис. 1. Погрешности, появляющиеся благодаря геометрической неточности станка.
При непараллельности направляющих суппорта оси шпинделя вместо цилиндрической поверхности будет взята коническая поверхность. При искажении прямолинейной формы направляющих в горизонтальной плоскости появятся искажения формы образующей линии обрабатываемой поверхности.
Искажения формы направляющих кругового перемещения кроме этого приводят к искажению формы обработанной поверхности. Так, при овальности шейки шпинделя токарного станка круговая направляющая линия обрабатываемой поверхности принимает форму овала.
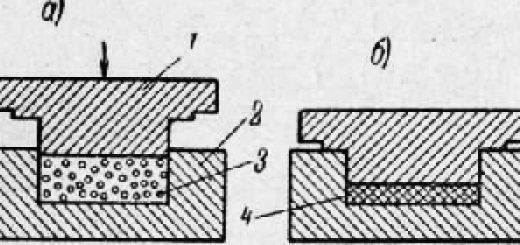
Погрешности обработки смогут появиться кроме этого при наличии погрешностей в положении посадочных поверхностей, определяющих положение режущего инструмента либо обрабатываемой подробности относительно рабочих органов станка. К примеру, при перекосе оси 0101 конического центрирующего отверстия относительно оси 00 шпинделя, закрепленная на оправке подробность, у которой обрабатывается наружная поверхность, примет форму, продемонстрированную на чертеже.
В случае если коническое отверстие центрирует режущий инструмент, к примеру сверло, то несоосность шпинделя и конического отверстия приведет к повышению диаметра обрабатываемого отверстия и может привести к поломке режущего инструмента. Неперпендикулярность упорного торца к оси шпинделя ведет к переносу зажимного патрона, а биение центрирующего буртика 2 — к биению патрона. В том и в другом случае появляются погрешности обработки.
Для типовых моделей станков с установившейся компоновкой геометрическая точность нормируется вышеупомянутым ГОСТ. При проектировании станков с уникальной компоновкой и особых станков нужно установить положение координатных плоскостей станка. В случае если станок имеет поворачивающийся рабочий орган, то две координатные плоскости, расположенные взаимно перпендикулярно, в большинстве случаев проходят через ось вращающегося рабочего органа, а третья — перпендикулярно к данной оси.
Одна из плоскостей, проходящих через ось вращающегося рабочего органа, находится параллельно плоскости перемещения одного из рабочих органов, совершающих прямолинейные перемещения. В случае если станок не имеет вращающегося рабочего органа, то одна из координатных плоскостей находится параллельно плоскости перемещения рабочего органа, совершающего прямолинейное перемещение, вторая — перпендикулярно к ней и параллельно направлению перемещения рабочего органа, а третья — перпендикулярно к двум первым.
По окончании выбора координатных плоскостей анализируется влияние погрешностей в размещении направляющих, посадочных мест и опорных поверхностей для установки обрабатываемых подробностей, приспособлений и режущего инструмента на погрешности обработки и устанавливаются нормы на эти погрешности. При установлении допускаемой величины погрешностей направляться руководствоваться вышеуказанными ГОСТ.
В один момент должны быть созданы и способы проверки величины погрешностей, появляющихся в ходе сборки и изготовления станка.
Способы проверки геометрической точности. При проверке геометрической точности вращающихся рабочих органов проверяется правильность расположения и биение оси опорных посадочных мест и поверхностей. В случае если шпиндель имеет центрирующую упорный буртик и шейку для посадки зажимных приспособлений, то проверяется биение центрирующей упорного буртика и шейки. Биение центрирующей шейки проверяется посредством индикатора, штифт которого опирается на центрирующую шейку.
Так как перемещение штифта индикатора результат совместного действия погрешностей формы центрирующей ее биения и шейки, то предварительно должна быть проверена форма шейки.
Проверка биения упорного торца кроме этого производится индикатором, наконечник которого опирается на торец. Индикатор показывает величину суммарного перемещения, появляющегося благодаря осевого осевого биения и биения торца шпинделя. Исходя из этого предварительно должна быть установлена величина осевого биения шпинделя, которая проверяется посредством индикатора, опирающегося на шарик, расположенный на оси
шпинделя и закрепленный в маленькой оправке. Величина перемещения штифта индикатора зависит от биения перемещений торца и сочетания шпинделя упорного буртика и изменяется в зависимости от положения полярного угла точки контакта штифта индикатора с торцом. Проверка производится при нескольких положениях точки контакта.
Биение торца определяется как алгебраическая сумма громаднейших показаний индикатора при проверке шпинделя и биения торца.
Биение конического центрирующего отверстия шпинделя проверяется посредством правильной цилиндрической оправки с коническим хвостом. Оправка устанавливается коническим хвостом в отверстие шпинделя. Посредством индикатора проверяется биение оправки у торца шпинделя и на определенном расстоянии от торца шпинделя.
На базе взятых показаний определяется угол между осью и осью шпинделя центрирующего отверстия.
Рис. 2. Проверка прямолинейности направляющих.
Прямолинейность направляющих. При проверке направляющих определяется их прямолинейность в двух взаимно перпендикулярных плоскостях и параллельность разных граней направляющих друг другу.
При довольно малый длине направляющих их прямолинейность возможно проверена посредством контрольной линейки. Линейка устанавливается на направляющих на двух плитках однообразного размера и зазор между плоскостью направляющей и линейкой в разных точках определяется посредством комплекта плиток.
Для проверки прямолинейности направляющих в вертикальной плоскости возможно использован прецизионный уровень. Уровень устанавливается на маленький ползун, форма которого соответствует форме контролируемых направляющих, и вместе с ползуном перемещается на протяжении направляющих. Устанавливая уровень по длине станины в ряд положений с равными промежутками между ними, отмечают по шкале уровня углы наклона направляющих в соответствующих сечениях.
На базе взятых разрешённых можно построить профиль направляющей в вертикальной плоскости.
Прямолинейность направляющих в вертикальной плоскости контролируют кроме этого посредством желоба, заполненного керосином. Зеркало жидкости, заполняющей желоб, есть горизонтальным. Желоб располагают на протяжении направляющей.
По направляющей перемещают маленький ползун с микрометрическим винтом, имеющим острый конический финиш. Переставляя ползун по длине станины в ряд положений с равными промежутками между ними, доводят острый финиш микрометрического винта до контакта с зеркалом керосина и по шкале винта отмечают величину погрешности для каждого положения.
удобство проверки и Высокая точность достигаются при применении разных оптических устройств.
Проверка прямолинейности направляющих в горизонтальной плоскости возможно произведена посредством микроскопа и струны, установленного на салазках либо маленьком ползуне. Перемещая микроскоп на протяжении струны, натянутой под действием груза, отмечают по шкале микроскопа величину погрешности направляющих.
Для проверки прямолинейности направляющих в горизонтальной и вертикальной плоскостях возможно использован автоколлиматор. По направляющим станины перемещается маленький ползун, на котором установлено железное зеркало. На зеркало падает параллельный пучок лучей, направляемый автоколлиматором.
Источник света освещает полупрозрачное зеркало, которое направляет пучок света на сетку с двумя взаимно перпендикулярными шкалами, расположенную в фокусе линзы. Линза направляет параллельный пучок света с изображением шкалы на зеркало 6. Отраженное под углом изображение шкалы спроектируется на сетку с соответствующим смещением. По смещению шкал, замечаемому в окуляре, определяют отклонение направляющих в вертикальной и горизонтальной плоскостях от заданного направления.
При проверке обоюдной параллельности направляющих маленький ползун с установленным на нем индикатором перемещается по одной из направляющих, а штифт индикатора скользит по второй направляющей.
Проверка обоюдного размещения направляющих и осей шпинделей. Параллельность направляющих оси шпинделя в двух взаимно перпендикулярных плоскостях проверяется посредством правильной оправки, установленной в шпинделе, ось которой сходится с осью индикатора и шпинделя, установленного на подвижном рабочем органе. Штифт индикатора последовательно перемещается на протяжении образующих оправки, расположенных в двух взаимно перпендикулярных поверхностях.
По окончании проверки параллельности направляющих возможно проверена параллельность опорной поверхности стола оси шпинделя. Эта проверка производится посредством неподвижного индикатора, штифт которого опирается на поверхность линейки, установленной на столе. При перемещении стола в направлении оси шпинделя индикатор продемонстрирует величину наклона стола довольно направляющих, а соответственно и оси шпинделя.
Перпендикулярность оси шпинделя к опорной поверхности стола возможно проверена посредством индикатора, закрепленного в шпинделе. Штифт индикатора находится в контакте с поверхностью стола. При повороте шпинделя индикатор продемонстрирует отклонение оси шпинделя от перпендикулярности в двух взаимно перпендикулярных плоскостях.
Проверка обоюдной перпендикулярности направляющих осуществляется посредством угольника. На столе, направляющие которого должны быть перепендикулярны к направляющим, устанавливается угольник. Посредством неподвижного индикатора угольник выверяется так, дабы грань 3 была параллельна направляющим. Штифт индикатора опирается на грань и угольник совместно со столом перемещается на протяжении направляющих.
Угольник должен быть выверен так, дабы в ходе перемещения индикатор не показывал бы отклонений. По окончании выверки угольника штифт индикатора опирается на стол и грань угольника перемещается по направляющим. По показаниям индикатора делают выводы о неперпендикулярности направляюших.
Обоюдная перпендикулярность направляющих кроме этого возможно проверена посредством угольника. По окончании проверки параллельности плоскости стола направляющим на опорную поверхность стола устанавливается угольник. При перемещении консоли по направляющим без движений закрепленный индикатор продемонстрирует величину отклонения от перпендикулярности направляющих.
Пользуясь способами, подобными обрисованным, возможно произвести все нужные испытания.
Кинематическая точность. Как указывалось выше, при кинематическом профилировании источником погрешностей, появляющихся в ходе обработки, смогут явиться погрешности передаточных взаимоотношений кинематической цепи, осуществляющей функционально связанные перемещения соответствующих рабочих органов.
Рис. 3. Проверка обоюдного размещения осей и направляющих.
Погрешности передаточных взаимоотношений смогут быть постоянными либо переменными. Постоянные погрешности появляются благодаря неосуществимости правильного подбора чисел зубьев шестеренок, входящих в кинематическую цепь. Невозможность правильного подбора обусловливается тем, что числа зубьев, каковые смогут быть использованы, ограничены относительно узким промежутком чисел: предельное количество зубьев принимается равным 20, а большое в большинстве случаев не превышает 100—125, так как при повышении числа зубьев возрастают габариты соответствующих узлов станка.
Число пар сменных шестерен, числа зубьев которых подбираются в соответствии с требующимся передаточным отношением, в большинстве случаев не превышает двух. Так, возможности подбора чисел зубьев ограничены. Еще больше возможности подбора суживаются потому, что комплект сменных шестерен, прилагаемый к станку, включает не все числа, имеющиеся в пределах от минимального до большого значений.
Как правило способы подбора, разглядываемые ниже, разрешают осуществить подбор с высокой точностью, но в некоторых очень правильных станках вводятся дополнительные кор-рекционные устройства для исправления погрешностей подбора сменных шестерен.
Переменные погрешности передаточного отношения смогут появиться в связи с погрешностями изготовления элементов кинематической цепи. К примеру, при биении зубчатого колеса мгновенное передаточное отношение зубчатой пары будет непрерывно изменяться.
Кинематические цепи, осуществляющие функционально связанные перемещения рабочих органов станков, как правило складываются из шестеренок. Последними звеньями этих цепей являются или винт с гайкой, или червячная передача. Исходя из этого при рассмотрении вопросов кинематической точности мы ограничимся лишь цепями этого вида, не смотря на то, что в отдельных случаях в станках видятся кинематические цепи для осуществления функционально связанных перемещений, имеющие в собственном составе и другие механизмы.
Мгновенное передаточное отношение зубчатой пары есть функцией последовательности погрешностей шестеренок, входящих в состав данной пары: биения начальной окружности, накопленной погрешности шага, погрешностей профиля и др., каковые появляются при изготовлении и в ходе износа. Громаднейшую роль играются биение и накопленная погрешность шага. В работах, посвященных вопросам кинематической точности зубчатых передач, анализируется совместное влияние указанных погрешностей.
Но ГОСТ 1643—56 и ГОСТ 1758—56, нормирующие отклонения и допуски для разных зубчатых передач, устанавливают допуск на кинематическую погрешность колеса, что и возможно конкретно использован при рассмотрении вопросов точности кинематических цепей.
При определении погрешности в перемещении рабочего органа нужно кроме этого учитывать накопленную погрешность шага ходового винта.
Еслй последним звеном кинематической цепи есть червячная передача, то определяется погрешность в угле поворота вала червячного колеса. Пользуясь наряду с этим формулой, нужно учитывать кроме этого кинематическую погрешность червячной пары, которая определяется ГОСТ 3675—56.
Необходимо заметить, что погрешности в перемещении рабочего органа по большей части определяются погрешностями последнего звена — ходового винта либо червячной пары.
Способы проверки кинематической точности зависят от характера перемещения рабочего органа. При прямолинейном перемещении для данной цели смогут быть использованы плоские железные штриховые меры, каковые используются в отсчетных устройствах станков. Штриховая мера устанавливается без движений, а на подвижном рабочем органе закрепляется микроскоп. Сменные шестерни подбираются так, дабы за один оборот вала рабочий орган перемещался бы на один мм.
По шкале микроскопа определяются погрешности в фактическом перемещении рабочего органа.
Для проверки кинематической точности станков, предназначенных для образования винтовых поверхностей, употребляется эталонный винт высокой точности. Винт устанавливается между центрами и приобретает вращение от шпинделя станка. Винт информирует перемещение гайке, которая имеет поводок. Поводок входит в держатель, установленный на суппорте.
Держатель не разрешает гайке вращаться, но оставляет свободу перемещения на протяжении оси. На суппорте установлен кроме этого индикатор, штифт которого опирается на торец гайки. Сменные шестерни подбираются так, дабы за один оборот шпинделя, а соответственно и эталонного винта, суппорт перемещался бы на величину шага эталонного винта.
Следовательно, гайка и индикатор все время будут перемещаться на однообразную величину и при отсутствии кинематических погрешностей штифт индикатора не будет смещаться. При наличии кинематических погрешностей индикатор и гайка будут перемещаться на индикатор и различную величину продемонстрирует величину кинематической погрешности. Вместо индикатора возможно установлен сигнальный измерительный прибор, сигналы которого смогут быть записаны на пленку посредством осциллографа.
При вращающемся рабочем органе кинематическая точность возможно проверена посредством круговой микроскопа и шкалы. Правильная стеклянная круговая шкала с ценой деления 1° устанавливается на вращающемся рабочем органе. Деления шкалы наблюдаются в микроскоп.
Сменные шестерни подбираются так, дабы за один оборот вала рабочий орган повернулся бы на один градус. По шкале микроскопа определяют отличие между расчетным и фактическим перемещением.
Для проверки кинематической точности возможно использован кроме этого автоколлиматор. На вращающемся рабочем органе устанавливается многогранная железная зеркальная призма. На грань призмы проектируется посредством автоколлиматора изображение шкалы, а изображение шкалы, отраженное призмой, отмечается в окуляр автоколлиматора. По смещению шкал, замечаемому в окуляр автоколлиматора, определяется неперпендикулярность грани призмы к оси автоколлиматора.
Вращением рабочего органа первая грань призмы, именуемой кроме этого полигоном, устанавливается перпендикулярно к оси коллиматора. Потом рабочий орган последовательно поворачивается на угол между гранями призмы и в автоколлиматоре отмечается отклонение каждой очередной грани от перпендикулярности.
Рис. 5. Проверка кинематической точности.
На данный момент используются разные электрические устройства, каковые разрешают фиксировать кинематическую неточность на ленте осциллографа либо на особой ленте самописца.
Уникальный магнитный прибор для проверки кинематической точности создан НИИ металлорежущих станков в Праге. На столе и на валу червяка устанавливаются железные диски. На перифирии дисков имеется слой, на котором возможно вести магнитную запись.
Запись производится способом, подобным применяемому в магнитофонах. Около намагниченного диска создается синусоидально изменяющееся магнитное поле с целым числом волн. Минимальная протяженность волны 20 мк; громаднейшая накопленная погрешность возможно доведена до минимальной величины 1,5 мк.
Отношение числа волн, записанных на диске, к числу волн, записанных на диске, равняется передаточному отношению червячной пары. При вращении дисков в магнитных головках генерируются синусоидально изменяющиеся сигналы, каковые по окончании усиления в усилителе поступают к фазочувствительному детектору. В следствии кинематической неточности появляется сдвиг фаз сигналов, генерируемых в головках.
Фазочувствительный детектор производит сигнал, пропорциональный сдвигу фаз, что поступает к записывающему устройству.
При работе станка под нагрузкой появляются дополнительные кинематические погрешности, обусловленные деформациями звеньев кинематической цепи, колебательными процессами, зазорами в кинематической цепи.
Для уменьшения кинематических погрешностей направляться уменьшать число звеньев кинематической цепи, снабжать высокую жесткость и вводить устройства для устранения зазоров. С целью уменьшения статических погрешностей, т. е. погрешностей, появляющихся в ненагруженной цепи, используют разного рода коррекционные устройства.
Погрешности установочных ограничения и перемещений рабочих ходов. Как мы видели выше, обоюдное размещение обрабатываемой подробности и режущего инструмента при ограничении установочных рабочих и перемещений ходов определяется или посредством отсчетных устройств, или посредством твёрдых ограничителей, до которых рабочий орган доводится вручную, или посредством ограничителей ходов совокупности автоматического управления.
Посредством отсчетных устройств осуществляется:
1) начальная установка рабочих органов при координации обоюдного размещения режущего инструмента и обрабатываемой подробности;
2) перемещение рабочего органа на заданную величину при переходе от обработки одной поверхности установленной на станке подробности к второй;
3) ограничение рабочих ходов;
4) вторичная установка в заданное положение рабочего органа настроенного станка при обработке повторяющихся подробностей партии.
В первых трех случаях посредством отсчетного устройства осуществляется перемещение рабочего органа на заданную величину. Погрешности перемещения зависят от «разрешающей свойства» механизма установочных соответствия и перемещений настоящей величины перемещения величине, определяемой посредством отсчетного устройства.
Под разрешающей свойством понимается минимальное перемещение рабочего органа, которое возможно осуществить посредством механизма установочных перемещений. Величина минимального перемещения определяется ценой деления отсчетного устройства и «чувствительностью» привода установочных перемещений.
Минимальное перемещение, которое возможно выполнить посредством отсчетного устройства, в большинстве случаев равняется цене деления отсчетного устройства и лишь в отдельных случаях, при громадном промежутке между штрихами делений отсчетного устройства, возможно переместить рабочий орган на величину, меньшую цены деления, определяя долю промежутка на глаз. В случае если точность задания величины перемещения превышает цену деления, то величина перемещения, делаемого посредством отсчетного устройства, будет различаться от заданной. К примеру, в случае если цена деления 0,02 мм, а размер задан с точностью до 0,01 мм, то перемещение возможно выполнить лишь с точностью до 0,02 мм.
Минимальное перемещение рабочего органа может кроме этого ограничиваться чувствительностью привода установочных перемещений. К ведущему звену привода установочных перемещений должно быть приложено упрочнение, величина которого определяется силами трения в направляющих рабочего органа. В ходе возрастания упрочнений до требующейся величины происходит деформация звеньев привода.
В момент начала перемещения сила трения в направляющих рабочего органа падает, поскольку коэффициент трения спокойствия значительно уменьшается до значения, соответствующего коэффициенту трения перемещения. Соответственно уменьшаются и силы, привёдшие к упругим деформациям звеньев привода. Наряду с этим привод, действуя как деформированная пружина, перемещает рабочий орган вперед.
Величина этого перемещения по большей части определяется жесткостью привода, падением нагрузки при переходе от состояния спокойствия к состоянию перемещения и массой перемещаемого рабочего органа.
К вопросу о чувствительности привода мы возвратимся ниже, в параграфе, посвященном жесткости.
Соответствие настоящей величины перемещения рабочего органа величине перемещения, определяемой посредством отсчетного устройства, в значительной степени зависит от форм связи отсчетного устройства с рабочим органом. Детально данный вопрос рассматривается ниже, в параграфе, посвященном механизму установочных перемещений. Тут же увидим, что отсчетное устройство возможно связано с рабочим органом конкретно либо кинематически.
При наличии кинематических связей погрешности в величине настоящего перемещения появляются благодаря кинематических погрешностей передач. В случае если установка рабочего органа в заданное положение происходит при его перемещении как в прямом, так и в обратном направлении, то погрешности в настоящем положении появляются кроме этого благодаря наличия зазоров в кинематических цепях. Для уменьшения указанных погрешностей в кинематических цепях предусматриваются устройства для устранения зазоров и коррекционные устройства, компенсирующие кинематические погрешности.
Влияние зазоров в кинематических цепях возможно кроме этого устранено применением особых приемов при исполнении установочных перемещений. При каждом очередном перемещении рабочий орган подают в заданное положение, перемещая его неизменно в одном и том же направ-. лении. В случае если по характеру делаемого процесса рабочий орган нужно переместить в противоположном положении, то его перемещают на величину громадную требующейся и после этого возвращают назад.
Требующиеся наряду с этим перемещения смогут выполняться кроме этого машинально.
При повторной установке рабочего органа влияние рассмотренных погрешностей исключается.
Твёрдые ограничители, до которых рабочий орган доводится вручную, употребляются лишь для повторной установки рабочих органов. В этом случае главным источником погрешностей являются колебания упрочнений прижима к твёрдому ограничителю, а соответственно и деформаций звеньев, ограничивающих перемещение рабочего органа. Вопрос о погрешностях, появляющихся в этом случае, подробнее рассматриваются в параграфе, посвященном механизмам правильных установочных перемещений.
Погрешности ограничения установочных рабочих и перемещений ходов в совокупностях автоматического управления в значительной степени зависят от структуры совокупности вида и автоматического управления, и конструкции привода, применяемого для этих перемещений. Влияние указанных факторов на точность рассматривается в соответствующих главах, посвященных конструкции привода и совокупностям автоматического управления, тут же ограничимся рассмотрением последовательности неспециализированных факторов, независящих конкретно от совокупности автоматического управления.
К числу главных факторов относятся: динамические качества .привода, скорость перемещения рабочего органа перед остановкой, чувствительность сил привода и стабильность сопротивления.
Под динамическими качествами привода в этом случае понимается быстрота реакции привода на сигнал остановки либо трансформации скорости. Динамические качества привода в значительной степени определяются массой привода, приведенной к рабочему органу.
От приведенной массы зависит кинетическая энергия совокупности перед остановкой. Запас кинетической энергии перед остановкой может колебаться благодаря вероятных колебаний скорости привода. Силы сопротивления кроме этого не являются стабильными.
Силы резания смогут изменяться благодаря колебания припусков, механических черт материала отдельных подробностей партии, затупления режущего инструмента. Силы трения также будут изменяться в связи с трансформацией температуры, других факторов и нагрузок. Изменение величины кинетической энергии сил и системы трения приводит или к трансформации упрочнений, действующих на твёрдый ограничитель в момент остановки, или к трансформации величины выбега рабочего органа по окончании выключения привода.
В том и в другом случае появляются погрешности в размерах.
Чем меньше приведенная масса привода, тем меньше выбег рабочего органа, а соответственно и величина рассеивания выбега, которая приблизительно пропорциональна самому выбегу.
При механическом приводе уменьшения приведенной Массы возможно достигнуть выбором самая рациональной схемы привода, применением пар, владеющих высоким к. п. д., верным определением минимальной нужной мощности привода, соответствующим конструктивным оформлением подробностей привода. Значительное уменьшение приведенной массы привода возможно получено при применении передач винт — гайка с циркулирующими шариками, поскольку благодаря высокому к. п. д. этих передач существенно понижается потребная мощность привода, а соответственно значительно уменьшается и приведенная масса.
Так как величина кинетической энергии еще в основном зависит от скорости, то при высоких требованиях к точности остановки прибегают к автоматическому уменьшению скорости перемещения рабочего органа перед остановкой, во многих случаях до 2—5 мм/мин.
Увеличение точности достигается кроме этого при торможении привода.
При сигнальных ограничителях ходов точность остановки зависит кроме этого от рассеивания времени передачи сигнала и времени срабатывания механизмов переключения. Рассеивание времени передачи сигнала и времени срабатывания механизмов переключения кроме этого приблизительно пропорционально самому времени. Согласно данным, приведенным акад.
В. И. Дикушиным, рассеивание времени-срабатывания образовывает +30% от времени срабатывания. Время срабатывания механизмов переключения возможно выяснено применительно к их конкретной конструкции. Время срабатывания аппаратуры совокупности управления зависит от ее типа, других параметров и размеров.
Так, к примеру, время срабатывания кодовых реле, каковые употребляются в совокупностях управления, образовывает около 0,015 сек, время срабатывания тяговых электромагнитов колеблется в пределах 0,05—0,2 сек.
Фактически безынерционной есть электронная и полупроводниковая аппаратура.