Винт на контроле
")
При отработке винтомоторных установок аэросаней, мотодельтапланов, самолетов, и авиамоделей конструктору требуется знать правильные значения последовательности параметров. И самое основное — частоту вращения воздушного винта. Это нужно и при форсировке двигателей, и при подборе пропеллера.
Частота вращения есть кроме этого одним из главных параметров в ходе эксплуатации мотора: по величине этого параметра возможно объективно делать выводы о надежности работы двигателя.
Во многих случаях «привязать» к винтомоторной установке какой-либо из стандартных тахометров легко нереально: Ну а в то время, когда дело касается модельных двигателей, то контактные замеры смогут так исказить их работу, что о каких-либо тонкостях регулировки уже не может быть и речи.
Предлагаю вниманию читателей бесконтактный электронный тахометр, предназначенный для измерения частоты вращения воздушного винта без применения каких-либо механических связей датчика с валом двигателя.
Тахометр складывается из двух частотомера и — основных частей датчика (рис. 1).
Рис. 1. Блок-схема тахометра:
1 — датчик, 2 — частотомер, 3 — индикатор, 4 — калибратор.
Датчик производит импульсные сигналы, следующие с частотой, кратной скорости вращения винта. Кратность наряду с этим определяется числом лопастей. Для данного тахометра возможно применять два типа датчиков: электростатический и оптический.
Созданный специально для обрисовываемого прибора электростатический датчик преобразует заряд накапливающийся на лопастях вращающегося винта при трении о воздушное пространство, в импульсное напряжение. Для этого в датчике имеется чувствительный элемент (рис. 2) — узкая, из железной пластины либо проволоки антенна, устанавливаемая параллельно плоскости вращения винта.
Рис.
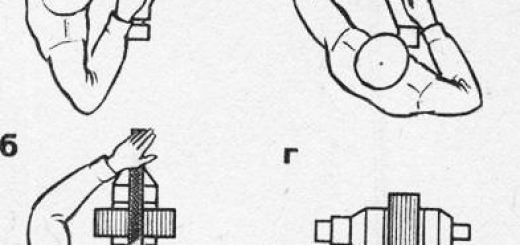
2. Принцип работы электростатического датчика (а) и оптического датчика (б).На рисунке цифрами продемонстрировано:
1 — воздушный винт, 2 — чувствительный элемент (антенна) электростатического датчика, 3 — усилитель, 4 — источник света, 5— светоприемник с чувствительным элементом оптического датчика, 6 — усилитель.
При прохождении заряженных лопастей мимо антенны в ней будет наводиться переменное напряжение, частота которого будет определяться выражением (K*N)/60, где К — количество лопастей винта, N — частота вращения винта (об/мин).
Антенна электростатического датчика есть источником низкого (порядка единиц милливольт) напряжения с высоким внутренним сопротивлением, равным сопротивлению изоляции.
Для обеспечения обычной работы частотомера это напряжение подводится к усилителю с высоким входным сопротивлением (рис. 3).
Рис. 3. Принципиальная схема электростатического датчика.
Высокое входное сопротивление достигается применением согласующего каскада, являющегося комбинацией потокового повторителя на полевом транзисторе VT1 и эмиттерного повторителя на биполярном транзисторе VT2. Операционный усилитель DA1 снабжает усиление сигналов до отметки, достаточного для работы частотомера.
Оптический датчик складывается из источника света, чувствительного элемента — фотодиода либо усилителя — и фоторезистора.
чувствительный элемент и Источник света располагают так, дабы луч проходил через плоскость винта. При вращении лопасти иногда пересекают луч, падающий на включенный между эмиттером и базой чувствительный элемент (рис. 4), иногда изменяя его сопротивление и тем самым образуя на базе транзистора переменное напряжение.
Рис. 4. Принципиальная схема оптического датчика.
Полученные импульсы усиливаются двухкаскадным усилителем до величины, достаточной для работы частотомера.
Частотомер преобразует полученные отдатчиков импульсы в постоянный ток, пропорциональный частоте следования импульсов. Его главным элементом есть ожидающий мультивибратор на транзисторах VT5 и VT6 (рис. 5).
Рис.
5. Принципиальная схема частотомера.
При поступлении на ожидающий мультивибратор сигналов с датчиков он производит импульсы постоянной длительности, определяемой лишь размерами ёмкостей и резисторов схемы.
При вращении винта на выходе ожидающего мультивибратора образуется последовательность импульсов с длительностью и постоянной амплитудой, частота следования которых пропорциональна скорости вращения винта.
Полученная импульсная последовательность содержит постоянную составляющую, величина которой зависит от так называемой скважности — отношения периода следования импульсов к их длительности, другими словами и от скорости вращения винта.
Постоянная составляющая выделяется интегрированием импульсной последовательности. Интегрирующим элементом есть стрелочный прибор РА1, служащий одновременно и для индикации скорости вращения винта.
В этом случае была использована магнитоэлектрическая головка на 100 мкА с добавочным резистором R22. Возможно применен и более неотёсанный прибор. Переменный резистор R21 употребляется при калибровке тахометра. Для развязки интегратора и ожидающего мультивибратора употребляется эмиттерный повторитель на транзисторе VT7.
Питание прибора осуществляется от батарей либо от выпрямителя с напряжением 9,5 В.
При изготовлении тахометра возможно принято любое конструктивное выполнение, но самая целесообразной представляется конструкция в виде двух блоков — частотомера и датчика с индикатором, связанных между собой трехпроводным кабелем.
Электростатический датчик обязан шепетильно экранироваться.
Антенна датчика возможно выполнена из отрезка бронзовой проволоки, узкой полосы бронзы либо фольгированного стеклотекстолита. При проведении измерений она обязана размешаться параллельно плоскости вращения винта на расстоянии, снабжающем обычную работу прибора.
Для увеличения точности измерения скорости вращения винта перед тем как приступить к работе нужно проводить калибровку тахометра, для чего в его состав введен калибратор (встроенный либо выносной).
Калибратор является мультивибратором(рис. 6), генерирующий маленькие импульсы, частота следования которых определяется размерами резисторов R24, R25 и емкостей C6, C7 и выбирается, исходя из диапазона измеряемых скоростей. Для достаточной точности измерений калибровку необходимо проводить в двух-трех точках диапазона скоростей.
Наряду с этим нужные частоты следования импульсов для двухлопастного винта определяются выражением f=N/30.
Рис. 6. Принципиальная схема калибратора и таблица значений R25 для калибровочных точек.
В таблице (см. рис. 6) приведены значения резисторов R24 и R25 для разных скоростей вращения винта. Правильная установка частоты осуществляется подстроечyым резистором R30, наряду с этим контроль установки частоты проводится посредством точного цифрового частотомера.
Взять пара значений частоты возможно методом ступенчатого трансформации резисторов R24 и R25 либо применением нескольких генераторов.
В.
ЕВСТРАТОВ, инженер